MEJORAS EN LA PATENTE PRINCIPAL P200201666 "ROBOT PARALELO TREPADOR Y DESLIZANTE PARA TRABAJOS EN ESTRUCTURAS Y SUPERFICIES".
-
Inventores/as:
- ARACIL SANTONJA,RAFAEL
- SALTAREN PAZMIO,ROQUE JACINTO
- JUAN LOPEZ CORONADO
-
Universidad Politécnica de Madrid
info
Universidad Politécnica de Madrid
Madrid, España
-
Universidad Politécnica de Cartagena
info
Universidad Politécnica de Cartagena
Cartagena, España
ES2253960A1 (01-06-2006)
ES2253960B1 (16-07-2007)
P200302920 (10-12-2003)
Resumen
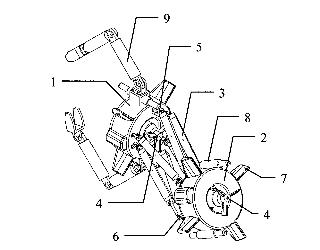
Mejoras en la patente principal P200201666 "robot paralelo trepador y deslizante para trabajos en estructuras y superficies".
La presente invención se refiere a un robot submarino de estructura paralela consistente en la mejora o desarrollo de la patente principal P200201666 "robot paralelo trepador y deslizante para trabajos en estructuras y superficies" a la navegación teleoperada bajo el agua. El desarrollo que se presenta consiste en adosar a cada anillo del robot (1) y (2) las aletas (7) para el control de la estabilidad y la navegación bajo el agua. El robot submarino, dispone de motores impulsores (4) que van ensamblados en los anillos (1) y (2) y que le permiten propulsarse, así como brazos manipuladores (9) más un sistema de control por computador alojado en los anillos (1) y (2).